
Case Study: Optimization of 800 kg bobbin handling processes

Modern production facilities face challenges related to handling heavy and cumbersome loads, such as large bobbins. THEMA, specializing in the production of industrial manipulators, offers devices that enable stable handling of problematic loads. Manipulators not only improve the ergonomics of operators' work but also increase the efficiency and safety of operations. In this case study, we present the implementation process of THEMA pneumatic manipulator for 800 kg bobbins, its key features, and the benefits achieved.
How was bobbin handling before the manipulator implementation?
Before the implementation of the THEMA pneumatic manipulator, the bobbin handling process relied on a traditional chain hoist equipped with lifting accessories. Although this solution had been used for years, it generated a number of problems affecting operational efficiency and operator safety.
1. Load swinging during lifting
During the lifting of bobbins using a chain hoist, uncontrolled oscillations of the load occurred. The swinging load not only made it difficult to precisely position the bobbin in the target location but also posed a direct risk to operators and the surrounding area. Any unforeseen movement could lead to an accident, increasing the risk of injuries and potential equipment damage.
2. Ergonomic issues
Controlling the chain hoist required significant physical effort from the operators. Manually handling massive bobbins involved exerting a considerable amount of energy, leading to rapid fatigue. In practice, operators were exposed to muscle and joint strains, increasing the risk of injuries and resulting in a decline in work efficiency as fatigue set in.
3. Low efficiency
The traditional chain hoist required precise coordination and accurate bobbin positioning to prevent swinging or shifting of the load. Each lifting and moving operation was time-consuming and required constant operator attention. Additionally, the lack of advanced motion compensation mechanisms made the process prone to errors. Consequently, even the slightest misalignment of the bobbin could result in delays and disruptions in production continuity.
All these challenges led the company to seek a more advanced, ergonomic, and safer solution that could reduce the risk of accidents, minimize physical strain on operators, and optimize operational time. For this reason, the decision was made to implement the THEMA pneumatic manipulator.
Solution – Implementation of THEMA pneumatic manipulator
THEMA designed and delivered a pneumatic manipulator that was precisely tailored to the operational requirements of the facility.
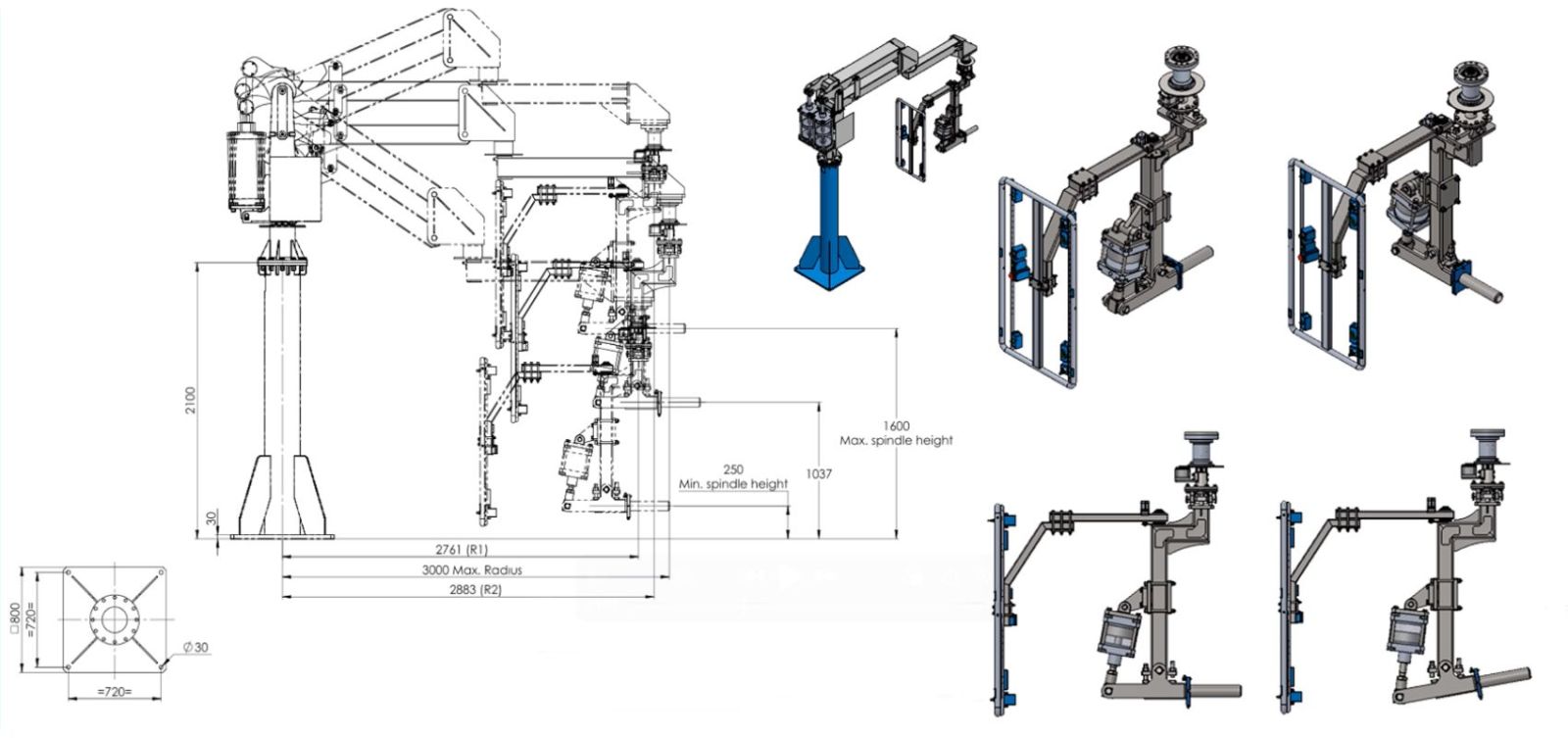
Key features of the manipulator:
Elimination of load swinging
Precise motion control eliminates uncontrolled oscillations of the load, directly translating into greater operator safety and stability of the transferred bobbins. In the case of 800 kg bobbins, any uncontrolled oscillation could lead to equipment damage or pose a health risk to workers.
Ergonomic design
The manipulator is equipped with adjustable handles and smooth lifting motion, reducing the physical strain on the operator. This allows personnel to focus on precise load maneuvering without excessive physical effort.
Customizability
The device handles bobbins of various diameters and weights, making it a universal solution for different industries, such as the paper, textile, and packaging sectors.
Safety system
The rope guiding and deflection compensation system ensures stability throughout the entire transfer process, while the motion control system automatically adjusts to dynamic loads.
Deflection compensation – a key system component
In the process of handling heavy bobbins, one of the biggest challenges is stabilizing the load during lifting. For THEMA manipulators, the key solution to this problem is the compensation cylinder, which automatically corrects the deflection of the bobbin caused by its weight.
Traditional lifting systems are prone to uncontrolled load shifts, which can lead to oscillations and swinging of the bobbin. The compensation cylinder eliminates this risk, keeping the bobbin in a stable, vertical position throughout the entire transfer process.
Benefits of using the compensation cylinder:
- Stability and smooth movement of the bobbin – The compensation system operates in real time, maintaining the bobbin in a neutral position and minimizing the risk of sudden movements.
- Reduced operator effort – Operators no longer need to manually control the deflection of the bobbin, significantly reducing physical strain and fatigue.
- Operational precision – The compensation cylinder enables accurate positioning of the bobbin, even for loads with asymmetrical shapes or varying weights.
- Reduced risk of equipment damage – Maintaining the bobbin in a stable position protects both the manipulator and the transported load from accidental collisions or drops.
Rotary control handle – full control
During the process of transferring bobbins, precise positioning of the load relative to the production machine or assembly line is crucial. The rotary control handle in the THEMA manipulator is designed to allow the operator to accurately adjust the bobbin’s angle without the need for manual repositioning.
With a rotation range of +/- 90 degrees, the handle provides complete control over the orientation of the bobbin, significantly enhancing maneuverability, especially for large and heavy loads.
Benefits of the rotary control handle:
- Increased maneuverability and the ability to precisely adjust the bobbin’s angle.
- Accurate control over the bobbin’s positioning, minimizing the risk of surface damage.
- Improved operator ergonomics – the ability to control movement without the need to change body position.
Detailed operation process
To fully understand the functionality of the THEMA pneumatic manipulator, it is essential to examine the detailed process of transferring bobbins. This process can be divided into six key stages:
1. Releasing the manipulator brake using the mushroom button.
2. Inserting the gripping tool into the bobbin core – this step requires precise positioning of the gripper to avoid surface damage to the bobbin.
3. Lifting the bobbin using the joystick – the operator has complete control over the speed and angle of lifting.
4. Deflection compensation using the compensation cylinder – the system automatically corrects deflection, keeping the bobbin in a vertical position.
5. Handle rotation and precise positioning of the bobbin – the handle rotates by +/- 90 degrees, allowing precise alignment of the bobbin relative to the target location.
6. Transferring the bobbin to the transport trolley and effortless unloading – the final stage, during which the operator can safely place the load, minimizing the risk of collisions or equipment damage.
The implementation of the THEMA pneumatic manipulator in this production facility has led to a significant improvement in workplace safety, operational efficiency, and operator comfort. Thanks to the use of the compensation cylinder and rotary control handle, the processes of transferring heavy bobbins have become more predictable, faster, and ergonomically optimized.
Want to learn more about process automation for your facility? Contact our expert to see how THEMA can help your company.







